6月22日、東京大学生産技術研究所(柏キャンパス/千葉県)で「自動運転AIチャレンジ2022」(主催:自動車技術会)の決勝大会が開かれ、当社の研究部門から若手社員2名が出場しました。日本一を目指してのチャレンジでしたが、残念ながら目標には届かず総合5位、クラス4位。実走行ならではの難しさをあらためて突き付けられる結果となりましたが、「このチャレンジによって得た経験を今後の仕事に活かしていきたい」と前向きにとらえています。
同大会には、全国の大学や研究機関、さまざまな業種の企業などから全261チームがエントリー。オンラインで行われた予選大会を通過した12チームが、この日、決勝大会で技術を競い合いました。
ヤマハ発動機の研究部門には、社員の自由闊達な自主研究を奨励する「エボルビングR&D活動」という制度があります。通称「5%ルール」と呼ばれるこの取り組みは、日々の研究活動のうち、5%の時間を業務とは直接関わりのない研究テーマに充てられる制度です。これまでにも、この活動を通じて電動トライアルバイクの開発や小型飛行機の研究など、ユニークで自主的な研究が活発に行われてきました。
エボルビングR&D活動によって「自動運転AIチャレンジ」に挑戦した同期入社コンビ
決勝大会に進出したのは、菊池和気さんと菊池章さんの同期入社コンビ。入社年も一緒なら苗字も同じ、さらに業務のシーンでもパートナーとして農業用自律車両の開発に取り組む息の合ったチームです。厳しい予選を勝ち上がった二人の目標は「もちろん、日本一」でした。
決勝大会は、あらかじめ設定された2種類のコースを自動運転で走行し、その合計得点によって競われました。一つのコースは、歩行者に見立てたマネキンの前で一時停止するとともに、障害物を正確に見分けて道路わきのダンボールをやり過ごすなど難易度の高いもの。またもう一方のコースは、120秒と定められた時間ぴったりで指定のルートを完走し、所定の位置に正確に停車させるというものです。全出場チームに等しく与えられた90分間のテスト走行では、この2つのコースをほぼパーフェクトで走らせた二人は自信をもって決勝に挑みました。
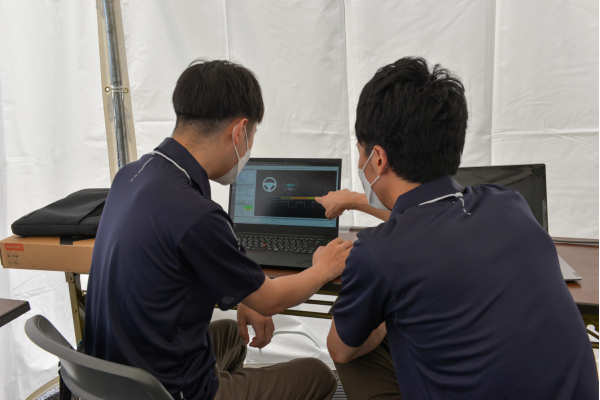
この後、ダンボールを歩行者と誤認してまさかの一時停止。「熱対策が不十分だった」と反省
ところが本番では、ダンボールの障害物を歩行者と誤認してしまい、まさかの停車。「正確なことはわかりませんが、強い太陽光による物体の見え方の変化や熱を持ったPCの影響だったかもしれません」と分析する二人。「もちろん分かっていたつもりでしたが、実走行ではあらゆる想定と対策が必要ということを、今日の結果であらためて思い知らされました」と振り返ります。
一方、2つ目のコースでは120秒ジャストで指定ルートを走り切り、なおかつ停車場所にもぴたりとつけるなど、制御の確かさを確認できるシーンをつくった二人。「目標を達成することはできませんでしたが、得るものは大きかった。この経験を現在開発中の農業用自律車両で活かしていきたい」と話してくれました。
入社年、苗字、仕事もすべて一緒の同期コンビ。「この経験を仕事に活かしたい」と口を揃えた
■菊池章さん(写真左)
エボルビングR&D活動の一環として本大会に出場し、限られた時間の中で役割分担し、仲間と協力しながら課題を解決していきました。障害物を計画通りに避けられた時には、嬉しくて揃って声をあげました。
決勝では悔しい結果となってしまいましたが、技術者として成長できる素晴らしい機会だったと思います.
自動運転要素技術は、モノの提供を得意とするヤマハ発動機が、コトを提供していく企業に発展していく上で重要な技術であると信じています。研究部では「工場」「農業」「過疎地域の移動手段」など、幅広い対象の自動化とそのサービス実現に向けて取り組んでいます。今後も新しい価値を提供できるように開発に取り組んでいきます。
■菊池和気さん(右)
ロボティクスや自動運転に関する幅広い経験を積めた大会でした。事前走行ではクリアできた種目も本番では問題が発生し、動作環境の多様さ、頑健なアルゴリズムの重要さを痛感しました。一方、チーム内での作業分担や速度制御の新手法導入は良い方向に働いてホッとしました。今回のチャレンジでわずかながらも公道向け自動運転の知見を得ることができました。今後はこの知見を高めながら、いままで培った農業系自動運転の技術を組み合わせて開発に取り組んでいきます。