日本電信電話株式会社(本社:東京都千代田区、代表取締役社長:澤田 純、以下「NTT」)は、視線(見ているところ)が、腕運動を行う際に新たな運動スキルを学習することと密接に関係することを、世界で初めて明らかにしました。
私たちは日常動作において、例えばテーブルの上のコップなどを掴む際に、コップを見つめながら手を伸ばすことが多くありますが、視線をすこしそらして周辺視野で見えている状態でも同じような腕運動を行えます。一方で、腕運動学習に関わる研究の多くは、腕の状態と腕運動学習の関係性に着目した議論に限られており、視線状態(視線を運動目標に向けているか、そらしているかの状態)がどのように腕運動学習に関係するかについては見過ごされてきました。
本研究では、視線を一定に保った状態で腕運動学習を行い、その後に様々な視線状態で学習結果の想起再現率(獲得した運動スキルを再現する度合い(※1))を評価する実験パラダイムを考案しました。その結果、学習中と異なる視線状態を用いると、学習結果を効果的に想起再現できないことが明らかになりました。すなわちこの結果は、視線状態と腕運動学習の間に強い連関が築かれていることを意味しています。さらに従来難しいとされてきた、相反する腕運動スキルの同時学習が、運動学習中に視線状態とスキルをペアにして試行毎に切り替えるだけで可能であり、視線状態毎に運動スキルが脳内で(ある程度)分離的に表現されることが示されました。
本研究の成果は、「腕運動学習は“腕の動かし方”のみを覚える」という従来の考え方に対して、「腕運動学習は“腕の動かし方と視線状態”を覚える」という新たな考え方を提案します。これら知見は、運動学習の統一的理解に向けた足がかりとなることに加え、スポーツやリハビリテーションにおける視線に着目した効果的な学習デザインや、デジタルツインに向けた人運動スキル表現の設計指針などにつながる可能性があります。
本成果は、2022年5月16日(米国東部時間)、米国科学雑誌「Current Biology」にオンラインで掲載されました。
1.研究の背景
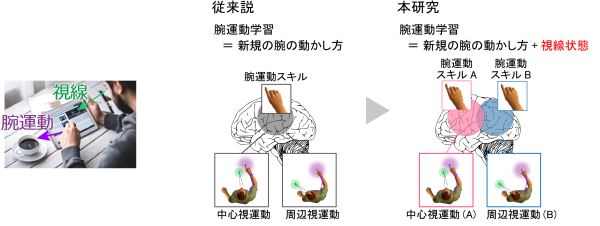
テニスでショットを打つ、車の運転をする、タブレット端末に目を向けながら机の端に置いたコーヒーカップに手を伸ばす。私たちは様々な方向に視線を向けながら、巧みな腕運動を行うことができます(図1左)。このような何気ない日常の動作は、脳の運動学習の仕組みによって支えられています。腕運動学習に関わる脳メカニズムの解明は、人の身体運動制御の本質的理解のみならず、スポーツ、医療、ヒト内面のデジタル化技術など、様々な社会応用に関連する重要な課題と言えます。
一般的に、「腕運動学習とは、腕の新たな動かし方を学ぶこと」と考えられます。この考え方に従い、従来研究においても、様々な腕の状態(運動目標の位置、腕の姿勢、腕を動かす速度など)が、どのように運動学習に影響し、学習結果をうまく引き出すのに有効か、などが議論されてきました。
一方、様々な視線状態で適切な腕運動を実行するためには、脳は、視野のどこで目標をとらえているかという“視線状態”を考慮した上で、目標位置の表現や腕の動かし方を計算する必要があります。しかしながら、視覚入力に対する腕運動学習においては、目標を中心視で捉える優位性のみが強調・議論され、「中心視や周辺視を含めた“視線状態”が腕運動学習とどのように関係するか」という問いについては、見過ごされてきました。それゆえ現在の運動学習の理論では、視線状態と腕運動学習は独立したものとみなされてきました(図1中、従来説)。
図1. 目標物を周辺視で見ながら腕運動を行う一例(左)、従来説(中)と本研究が示した新説(右)
2.研究の成果
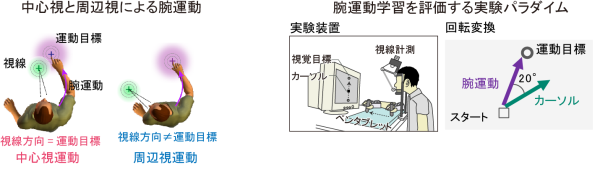
本研究では、腕運動を行う際の視線状態が、新規の運動スキルを獲得する腕運動学習と密接に関連することを明らかにしました(図1右、本研究)。腕運動を行う際の視線状態として、運動目標に視線を向ける中心視運動と、目標とは異なる場所に視線を向ける周辺視運動に着目し(図2左)、それぞれの視線状態で腕運動学習を行う実験パラダイムを考案しました。もし、視線状態が、獲得される腕運動スキルと密接に関連しているならば、学習中とは異なる視線状態を学習後に用いると、学習結果の想起再現率は低下することが予想されます。実際、私たちの実験結果はこの予想を支持しており、脳は腕運動学習を行う際、学習時の視線状態も含めて表現・記憶していることが示されました。つまり、中心視で学んだ腕運動スキルと、周辺視で学んだ腕運動スキルは、ある程度異なる運動記憶として、脳内で分離表現されていると解釈されます。さらに、この分離表現を利用することで、従来難しいと考えられていた、相反する二つの腕運動スキルを同時に学習することが、運動学習中に視線状態とスキルをペアにして試行毎に切り替えるだけで、可能となることが明らかになりました。これらの発見は、視線状態と腕運動学習の密接な関連を示しており、腕運動学習が、従来考えられてきた以上に、多様な身体状態との関連によって表現されていることを示唆しています。
図2. 本研究で着目する2つの視線状態(左)、実施した学習実験パラダイム(右)
3.研究の内容
(1)視線状態と腕運動学習の関わり
視線状態と腕運動学習の関わりを検証するために、中心視運動と周辺視運動(図2左)のそれぞれで腕運動学習を行う実験パラダイムを設計しました(実験1)。実験参加者の具体的な課題は、手に持ったペンをペンタブレット上で動かし、モニタに提示されるカーソルを視覚目標へと向かわせるように腕を運動させることでした(図2右、実験装置)。その際、「実際の腕」と「カーソル」の動きの間に、20°の回転変換を加え、運動にエラーが生じる状況を作り出します(図2右、回転変換)。この状況下で試行を数百回と繰り返すうちに、エラーを補償するように、腕運動の出だしの方向が徐々に変化していきます。この運動の出だしの方向変化の量を運動が学習された量として定量化することができます(回転変換学習)。
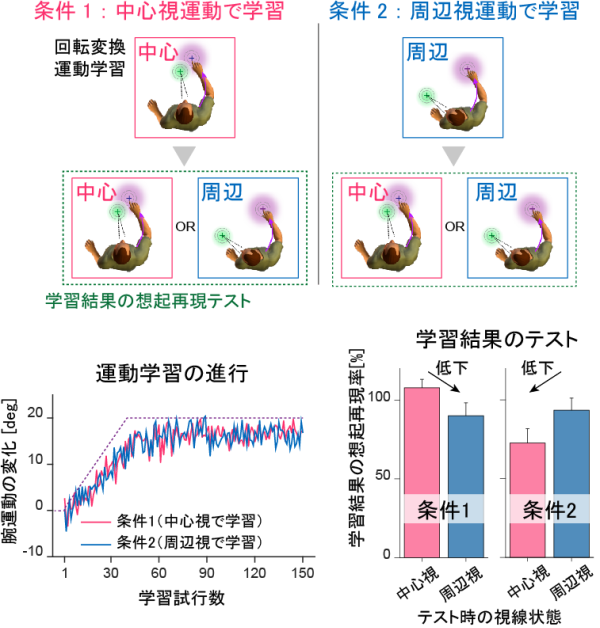
実験参加者は2つのグループに分けられました。図3上に示すように、条件1に割り振られた参加者は、まず中心視運動で回転変換に対する腕運動学習を行います。続いて、学んだ運動スキルをどの程度効果的に想起再現できるかを確認するテストを両視線状態で行います。一方、条件2に割り振られた参加者は、周辺視運動で学習することで、同様の実験課題を行います。
本実験で観察された運動学習の進行を図3左下に示します。学習の進み具合、最終的な学習の到達度は、中心視と周辺視、両視線条件で同程度でした。次に、カーソルが見えない状態で行う腕運動を計測することにより、獲得した学習結果を,どの程度効果的に想起再現できるかについて評価します。中心視運動で学習した参加者(図3上、条件1)の想起再現率は、学習時と異なる周辺視を利用する場合、同じ中心視利用と比較して、顕著に低下しました(図3右下)。一方、周辺視運動で学習した参加者(図3上、条件2)では、学習時とは異なる中心視で、想起再現率が顕著に低下しました。このことは、「中心視で運動をすることの優位性」に主眼を置いていた従来の考え方とは異なり、周辺視であっても中心視であっても、腕運動学習を行う際の視線状態が、学習結果の想起再現率を決定する重要な要素であることを意味しています。つまり、脳は腕運動学習を行う際、学習時の視線状態も含めて表現しており、学習時とは異なる視線状態を用いると、学習結果を効果的に想起再現できないことになります。
本実験で示された視線状態と腕運動学習との強い関連は、異なる視線状態で学んだ腕運動スキルは、脳内で(ある程度)異なる運動記憶として表現されることを意味しています。私たちは、より詳細な実験条件の設定とそこから得られた結果の解析により、「中心視、右周辺視、左周辺視」という3つの視線状態が、腕運動学習の分離表現に関与することも確認しました。
図3. 実験1 – 視線状態が、運動学習の進行、学習結果の想起再現に及ぼす影響
(2)異なる視線状態を利用した相反する運動スキルの同時学習
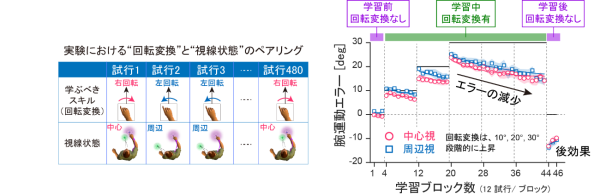
実験1で示した「視線状態に応じた運動学習の分離表現」という考えを更に検証する実験として、視線状態に応じて、右回転変換と左回転変換という相反する2つの腕運動スキルを同時に学習できるかを調べました(図4)。この実験2では、学習中に右回転変換と左回転変換が試行毎に順不同で提示されました。学習すべき運動スキルが相互に干渉するため、通常このような状況で両方のスキルを学習することは非常に困難です。本実験では、参加者に試行毎に回転変換の方向に応じて決められた視線状態をとるように指示し、中心視運動の試行では必ず右回転変換が、周辺視運動の試行では左回転変換が、提示されるような状況で学習を行ってもらいました(図4左)。実験結果からは、右回転と左回転の双方に対してエラーが減少する、つまり異なる腕運動スキルの同時獲得が可能であることが明らかになりました(図4右)。また、エラーの減少のみならず、学習後の後効果(※2)も明確に観察されました。これらの結果は、学習後に、ある試行を中心視運動で行うのか、周辺視運動で行うのかに応じて、適切に運動記憶が切り替えられていることを示唆します。この相反学習は一見簡単に思われるかもしれませんが、本研究では、視線状態の代わりに、視覚情報(背景色や位置関係)と回転変換の方向をペアにした場合には、同時学習は進行せず、ある特定の条件でしか成立しないことも明らかにしました。以上の結果は、環境との相互作用を実現する腕運動にとって、視線状態は常に考慮されるべき重要な情報であり、「腕運動学習は“腕の動かし方と視線状態”を覚える」という新たな考え方を示唆しています(図1右、本研究)。
図4. 実験2 – 視線状態の切り替えを利用した相反する腕運動スキルの同時獲得
4.今後の展開
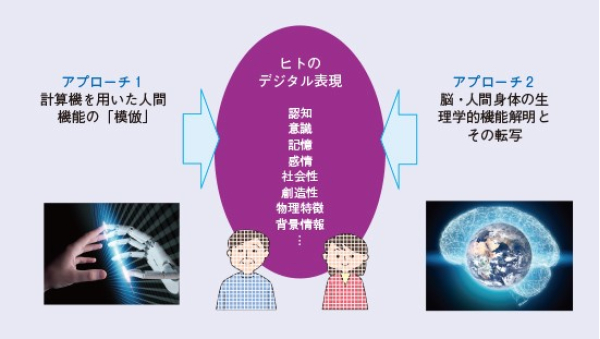
視線状態と腕運動学習の密接な連関を示した本成果は、従来考えられてきた以上に、腕運動学習が多様な身体の状態を含む複雑な表現である可能性を示しており、運動学習メカニズムの深い理解に向けてパラダイムシフトを引き起こすと期待しています。これら基礎知見をもとに、視線を運動目標に向けているか、目標からそらしているか、という視線状態を利用した、スポーツやリハビリテーションの効果的な学習デザインや、NTTの提唱するデジタルツインコンピューティングにおける視線状態まで含めた人運動スキル転写の基礎的デザイン指針の提案などをめざします。
図5. ヒト運動スキルを転写するアプローチ(
https://www.rd.ntt/iown/0003.html)
【論文掲載情報】
Abekawa, N., Ito, S., and Gomi, H. (2022). Gaze-specific motor memories for hand-reaching. Current Biology DOI: 10.1016/j.cub.2022.04.065
【用語解説】
※1 学習結果の想起再現率
回転変換学習などで獲得した腕運動スキル(手の動かし方)を、学習後にどの程度再現できるか、その想起率を指します。学習の最終過程で観察された手の動かし方と、全く同じ動きを再現できれば、想起再現率は100%となります。想起再現率は、ある条件下で獲得された運動スキルが、他の条件下でどの程度再現できるのか、汎化の度合いを評価するために良く用いられる指標です。
※2 後効果
運動学習によって獲得された運動記憶の保持強さの尺度。例えば、20°の右回転変換学習においては、回転変換による運動エラーを補償するために、「20°左方向に向かう腕の動き」を学びます。学習が十分進行した状態で、回転変換をなくして通常のカーソルフィードバックに戻すと、今度は左方向への腕運動エラーが観察されることになり、このエラーを後効果として評価します。後効果は、実験参加者にとって新たな運動エラーと認識されるにもかかわらず一定期間保持されることから、「学習過程に獲得された運動記憶の保持」と捉えることができます。
【研究体制について】
本研究は、平成28~令和2年度文部科学省科学研究費補助金新学術領域研究 人工知能と脳科学の対照と融合 潜在的運動における学習適応メカニズムの解明と計算モデル構築(JP16H06566)の助成を受けてNTTで行われました。