電気通信大学大学院情報理工学研究科機械知能システム学専攻の仲田佳弘准教授と、大阪大学大学院基礎工学研究科システム創成専攻の伴碧特任講師(常勤)、山木廉氏(当時博士前期課程学生)、堀部和也特任助教(常勤)、高橋英之招へい准教授、石黒浩教授の研究グループは、咀嚼して食べられる可食素材でできたロボット(可食ロボット(※1))を開発し、動いている状態で食べた際に知覚や食感が変化することを明らかにしました。これまでにも可食素材を用いたロボットの開発は行われていましたが、それを食べた時の心理的な影響については分かっていませんでした。研究グループは、ゼラチンと砂糖を主原料とした、市販のグミ程度の硬さの空気圧駆動の可食ロボットを開発し、実際に食べる実験を行いました。実験では、参加者に対し、二つの異なる条件を体験してもらいました。一つは動いている状態のロボットを食べる条件、もう一つは動いていない状態のロボットを食べる条件です。これらの条件下で、参加者の知覚、味覚、および食感を調査し、比較分析を行いました。この成果は、国際科学誌PLOS ONEに掲載されました。
【ポイント】
*人が食べることを目的としたロボットを開発
*可動部を全て食べられる素材で作ったロボットを食し、知覚、味覚、および食感を調査
*世界で初めて、ロボットが動いているときに食べると、人の知覚と食感に変化が生じることを明らかにした
*新たな食体験の創出や医療応用に繋がると期待
【背 景】
食文化は、歴史を通じて人の生活や文化と密接に結びついてきました。食事は、単なる栄養摂取の手段を超え、文化的アイデンティティや社会的な結びつきを象徴するものとなっています。日本においては、「踊り食い」という独自の食習慣があり、これは生きた魚介類を食べる文化を指します。このような文化は、食べ物と人との関係を深く掘り下げ、分析する上で重要な視点を提供しています。
一方で、科学技術の進歩は新たな食の形態を生み出してきました。その一例が、可食素材を用いたロボットの開発です。これまでの研究では、食べ物としてのロボットの物理的な側面や機能性は探究されてきました。しかし、人がこれらのロボットを食べた際の心理的な反応や感覚的な体験については、まだ十分には理解されていませんでした。
【手 法】
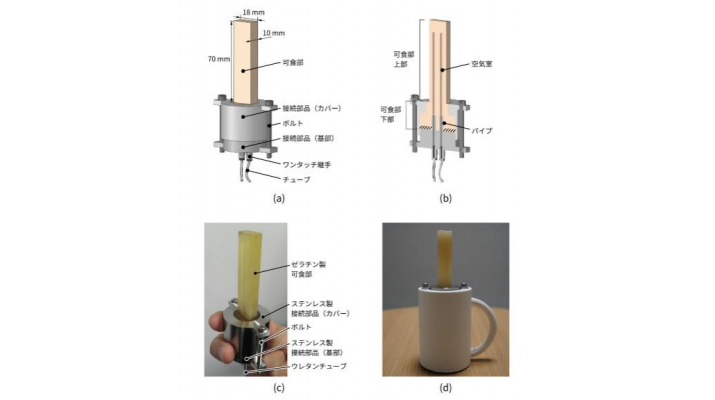
本研究で開発された可食ロボット(図1)は、ゼラチンと砂糖を主原料とし、空気圧で駆動するものです。ロボットの形状は、口に入れやすいスティック状に設計されました。
実験は2つ行われました。
第一の実験では、参加者がロボットの見た目からどのような印象を受けるかを調査しました。この実験は、ロボットの基本的な設計と動きに焦点を当て、参加者の感覚的な反応を探りました。
第二の実験では、参加者が実際にロボットを食べて評価を行いました。動いている状態のロボットを食べる条件と動いていない状態のロボットを食べる条件の2条件が実施され、参加者はロボットを食べた際の印象、味、および食感を評価しました。印象と味はリッカート尺度(※2)により評価し、食感は複数のオノマトペ(※3)選択肢から得られた感覚に近いものを選択することで評価しました。
【成 果】
第一の実験の結果、参加者は、動く可食ロボットを観察した際、縦方向に振動するよりも横方向に振動する動作に対して生きているような感覚を強く抱くことが分かりました。
また、第二の実験の結果、参加者は、動いていない状態のロボットを食べた条件よりも、動いている状態のロボットを食べた条件において、ロボットに対して知性、感情、生き物らしさ、罪悪感、および新鮮さをより強く知覚することが報告されました。さらに、食感をオノマトペで表現した際、条件によって異なる表現が使用されました。
以上のことから、動いているロボットを食べる際に、特定の印象や感覚を得ることが示されました。
【今後の期待】
この研究によって提案される新しい概念「Human-Edible Robot Interaction(HERI)(※4)」、つまり人が食べることができるロボットとの相互作用には、大きな可能性が秘められています。
HERIは、動いているロボットを食べる際の印象に関して、異なる文化間での差異を探る機会を提供し、新しい食体験やエンターテイメント性の高い食事の創出へと繋がるかもしれません。さらに、口腔刺激を通じた脳活動の促進といった医療分野への応用も考えられます。
HERIの研究は、また、人文科学、社会科学、生物学、心理学など多岐にわたる学際的な研究分野での議論を刺激します。特に、人の食行動における動物的要素や、動く物体が私たちの食欲や食行動にどのような影響を与えるかという視点が重要です。生きているように見えるロボットを食べる経験は、食育における哲学的議論を広げ、生命とは何か、ロボットを食べる際に生じる感情やバイオエシックス(※5)に関する理解を深めることになると考えられます。
従来の人-ロボット間の相互作用研究とは異なり、HERIはロボットを「食べる」という経験を通じて、アンケートでは捉えられない人の無意識的に行われるプロセスや、生き物やロボットに対する態度を探る新しいアプローチを提供できる可能性があります。
このような研究は、今後も多様な分野での議論を促し、学際的な研究の発展に貢献することが期待されます。
(参考動画)
https://youtu.be/OoAszrv5vy4
(論文情報)
・著者名:Yoshihiro Nakata, Midori Ban, Ren Yamaki, Kazuya Horibe, Hideyuki Takahashi,
and Hiroshi Ishiguro
・論文名:Exploring the eating experience of a pneumatically-driven edible robot: Perception, taste, and texture
・雑誌名:PLOS ONE
・DOI:10.1371/journal.pone.0296697
・公表日:2024年2月5日
(外部資金情報)
本研究一部は、電気通信大学2022年度研究活性化支援システム(若手外部資金獲得支援)XC2022008(実験結果解析)、JST ムーンショット型研究開発事業 JPMJMS2011(生命感ロボットとしての基盤研究)、および新学術領域研究(研究領域提案型)JP19H05693(システム開発)の支援を受けたものです。
(用語説明)
※1 空気圧駆動の可食ロボット:空気の圧力を利用して動く食べられるロボット。可食素材で内部に空洞のある構造を作り、そこに空気を入れて膨らませることで駆動する。駆動にモータなど食べられない素材を用いないため、可動部を全て食べられる。
※2 リッカート尺度:あるトピックに関する多段階の選択肢を含むアンケートを使用し、回答者が各項目に対してどの程度同意するかを測定するための尺度。この手法は、意見や態度の程度を数値で示すことにより、より詳細な分析を可能にする尺度として利用される。
※3 オノマトペ:音や感覚を表現するための言葉で、特定の音や動作、感触などを模倣した言葉。具体的には、コリコリ、ガブ、ムニャムニャなどを選択肢として用いた。
※4 Human-Edible Robot Interaction(HERI):人と可食ロボットとの相互作用を研究し、議論する学問。可食ロボットを食べる際の人間の心理的反応や認知効果の探求のほか、食べることに対する倫理的、社会的、哲学的な問題を、可食ロボットを用いることで深く理解することを目指す。
※5 バイオエシックス:生命科学や医療の進歩に伴って生じる倫理的、法的、社会的、哲学的な問題を研究し議論する学問。生命倫理。
(図1) 開発した可食ロボット:(a)は、可食部および可食部に空気を供給するチューブを接続するための部品の3Dモデルであり、(b)は、その断面図である。可食部の内部には2つの空気室があり、2つの空気室に同時に空気を供給すると縦方向の振動、交互に供給すると横方向に揺れる動作が生じる。(c)は、可食ロボットの実物、(d)は、実験のために、3Dプリンタで製作した持ち手を付けた可食ロボットの写真である。
【リリース発信元】 大学プレスセンター
https://www.u-presscenter.jp/